



En los últimos años, ha habido un creciente interés en investigaciones relacionadas con el recuento de folículos antrales (RFA) y su influencia en la capacidad reproductiva del ganado, así como su aplicación en biotecnologías asociadas a la reproducción (Ireland et al., 2011; Morotti et al., 2015). El RFA es sumamente variable en diferentes especies, pero en ganado, existe una alta repetibilidad en el mismo individuo, independientemente de raza, edad, temporada de cría, lactancia o condiciones de preñez (Burns et al., 2005). Además, el RFA es consistente a lo largo del ciclo estral en vacas individuales; por lo tanto, un único examen de ultrasonido de rutina es suficiente para identificar hembras con RFA bajo, medio o alto (Martinez et al., 2016). Más interesante aún, existen estudios que muestran que vacas con bajo RFA tienen baja fertilidad (Cushman et al., 2009; Martinez et al., 2016).
Para contar los folículos antrales, los veterinarios usualmente realizan una ecografía transrectal, durante la cual, luego de localizar la región del ovario, se lo escanea con un movimiento de rotación que lo recorre de polo a polo. El procedimiento debe realizarse en unos pocos segundos y requiere de entrenamiento por parte de los operadores, para poder detectar y contar los folículos de manera confiable. Los resultados son exactos cuando el ovario tiene unos pocos folículos grandes, pero la exactitud baja cuando el número de folículos en el ovario es grande y/o los folículos son pequeños.
El conteo automático del número de folículos antrales en el ovario permanece como un desafío abierto para los métodos del estado del arte (Hiremath y Tegnoor, 2013; Potocnik et al., 2012). Los bordes de los folículos pequeños son débiles e irregulares debido a las características de las imágenes de ultrasonido. La presencia de estructuras similares a los folículos, como los vasos sanguíneos, hacen que el problema sea aún más difícil. Sin embargo, contar el número de folículos tiene la ventaja que no requiere una segmentación precisa de los folículos. El problema ha sido abordado anteriormente de diferentes maneras, con imágenes de ultrasonido 2D y 3D, pero no hay hasta el momento resultados concluyentes a nivel académico o en desarrollos comerciales.
Se ha descrito un método para detectar automáticamente el ovario y los folículos en ultrasonido 3D (Chen et al., 2009). El enfoque propone un marco probabilístico para estimar el tamaño y la ubicación de cada folículo en el ovario, mediante la fusión de información de contexto, tanto global como local.
El software comercial SonoAVC que se encuentra integrado al ecógrafo Voluson E8 (GE Medical Systems) realiza una segmentación semiautomática de los folículos en imágenes de ultrasonido 3D utilizando un algoritmo basado en morfología matemática (Raine-Fenning et al., 2008).
Los métodos que detectan los folículos en 3D son probablemente los más exitosos. La información adicional presente en ultrasonido 3D puede ser utilizada efectivamente para discernir entre folículos y otras falsas detecciones (Potocnik et al., 2012). Sin embargo, veterinarios de nuestro grupo de investigación, en concordancia con trabajos previos (Potocnik et al., 2012), prefieren escaneos 2D porque las sondas les resultan más fácil de manipular y las imágenes de interpretar. Además, los ecógrafos 3D son aún de difícil acceso para los veterinarios de países en desarrollo. Por esta razón, nuestro objetivo es investigar si es posible contar el número de folículos utilizando videos de ultrasonido 2D.
En lo que refiere a la detección de folículos en una única imagen de ultrasonido, un grupo introdujo varios métodos basados en el crecimiento de regiones (Potocnik y Zazula, 2002a, 2000). Otro grupo propuso varios algoritmos basados en un esquema de extracción de características y clasificación (Hiremath y Tegnoor, 2013).
Para contar todos los folículos del ovario, se necesita más de una imagen. Una de las posibilidades es segmentar las imágenes cuadro a cuadro y luego agrupar las detecciones correspondientes a un mismo folículo como una única detección. Se ha descrito un método que trabaja con una secuencia temporal de imágenes de ultrasonido (Potocnik y Zazula, 2002b) que fue posteriormente mejorado (Potocnik y Zazula, 2003). Los bordes de los folículos detectados son seguidos por una combinación de tres filtros de Kalman mutuamente dependientes.
Lamentablemente, no existe una base de datos pública de imágenes de ultrasonido (2D o 3D) de ovarios que permita una comparación objetiva entre los diferentes métodos.
Conjunto de datos
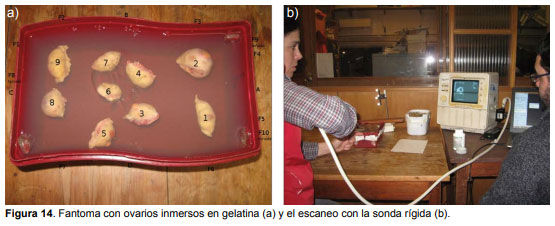
A los efectos de desarrollar y evaluar el abordaje propuesto, se confeccionaron dos fantomas (elemento utilizado para el calibrado de equipos de imagen y que contiene, en su interior, elementos de características similares a los del organismo) con nueve ovarios cada uno sumergidos en gelatina. Los ovarios se recogieron de un frigorífico, y se acondicionaron eliminando restos de tejido. Cada fantoma se construyó colocando los ovarios en una caja rellena de gelatina, a una altura aproximada de 1 cm.
Para cada ovario, un experto realizó 3 adquisiciones de ultrasonido con la sonda transrectal. Las adquisiciones se realizaron haciendo un giro de la sonda sobre su eje. Los videos fueron adquiridos a 30 cuadros por segundo, a una resolución de 640×480, siguiendo el siguiente criterio: (a) barrido de derecha a izquierda, de polo a polo del ovario (b) barrido de izquierda a derecha, de polo a polo del ovario (c) barrido de ida y vuelta, de polo a polo del ovario, mientras el experto realiza un conteo de folículos.
Luego de escanearlos con ultrasonido, los fantomas fueron desarmados y los ovarios disecados. Para cada ovario, todos los folículos y cuerpos lúteos fueron medidos. Los tamaños de los folículos variaron en el rango de 2 a 20 mm. La Figura 14 muestra uno de los fantomas y el procedimiento de adquisición de ultrasonido.
Procesamiento de señales para la detección de folículos
Detección de regiones candidatas en cada cuadro
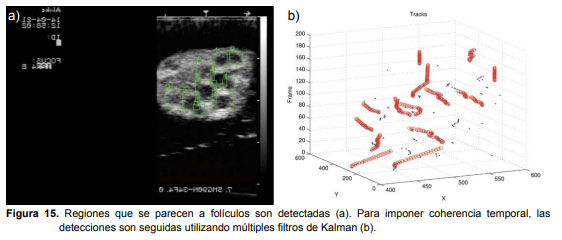
El primer paso consiste en detectar automáticamente, en cada cuadro de video, aquellas regiones que parecen ser folículos. Los folículos son estructuras aproximadamente esféricas, rellenas con líquido. La ecogenicidad en las paredes es alta, mientras que el fluido interior es prácticamente anecoico. Se observan típicamente en ultrasonido como círculos oscuros con bordes más intensos. Una cascada de clasificadores (Viola y Jones, 2001) de tipo boosting, que utiliza como características patrones locales binarios (en inglés Local Binary Pattern), es una eficaz y eficiente alternativa para detectar este tipo de estructuras. El clasificador fue entrenado con un conjunto de regiones pertenecientes a folículos, y con regiones negativas. Las regiones fueron escaladas a un tamaño de 24 x 24 píxeles, o equivalentemente 2,4 x 2,4 mm, de acuerdo a la resolución del video utilizado. La figura 15 muestra un ejemplo de una región detectada en un cuadro en particular.
Coherencia temporal mediante seguimiento múltiple
Si bien el movimiento realizado durante el escaneo del ovario es esencialmente una rotación, pueden existir también pequeñas traslaciones. Éstas traslaciones pueden ser involuntarias (pequeños movimientos del operador o el movimiento del animal durante el procedimiento, por ejemplo) o planificadas, como es el caso en que el ovario es más ancho que el espacio cubierto por la sonda de ultrasonido. En cualquier caso, si estos movimientos no son muy bruscos, el seguimiento puede lidiar con ellos y separar adecuadamente las detecciones en tracks coherentes.
A los efectos de imponer coherencia temporal, las detecciones son seguidas a lo largo de los cuadros de video, utilizando múltiples filtros de Kalman (Kalman, 1960) que asumen aceleración constante. Las detecciones de cada cuadro son asignadas a los tracks activos utilizando el algoritmo húngaro (Kuhn, 1955) usando como matriz de costo la distancia entre las posiciones predichas para cada track y las detecciones. Para cada cuadro, las detecciones del clasificador son asignadas a los tracks activos de acuerdo a la distancia entre las detecciones y las posiciones predichas por los tracks. Cuando las detecciones no son asignadas a ningún track activo, un nuevo track es creado. La figura 15b muestra un ejemplo de los tracks detectados.
Identificación de la región del ovario
En los fantomas, el ovario se encuentra rodeado de gelatina y esto, en cierta forma, facilita la identificación de la región del ovario. In vivo, el ovario es rodeado por otros tejidos y la superficie del mismo puede no ser fácilmente discernible. Algunas estructuras, que se ven en el ultrasonido similares a los folículos, pueden incluso generar detecciones espurias. De acuerdo a veterinarios familiarizados con este tipo de procedimientos, la superficie del ovario es a menudo difícil de identificar y la región del ovario es habitualmente reconocida por el agrupamiento de folículos los cuales son más fácilmente identificable en ultrasonido que la superficie del ovario. Con esto en mente, el abordaje en este trabajo es identificar la región del ovario como el agrupamiento de tracks detectados más importante. Para agrupar los tracks, se construye un mapa de probabilidad mediante la convolución de la posición de los tracks (pesadas por el largo de track) con un kernel gausiano. La región del ovario es detectada como el modo principal del mapa de probabilidad, calculado usando el algoritmo Mean Shift (Cheng, 1995), considerando un tamaño de ovario típico. La figura 16 muestra la región identificada en uno de los ovarios.
Identificación de folículos y medida
Para considerar un track detectado como folículo, el track debe haber estado activo al menos un número mínimo de cuadros. Esto permite diferenciar un folículo que es consistentemente detectado a lo largo de varios cuadros, de tracks originados por detecciones espurias de la cascada de clasificadores. Con este enfoque, es necesario determinar como punto de funcionamiento, el mínimo número de cuadros por encima del cual se considera un track como una detección de folículo. Dicho umbral se puede seleccionar como el que da los mejores resultados, en el sentido de menor error cuadrático medio, contra el conteo obtenido producto de la disección.
Una vez que el track es considerado un folículo, el diámetro del folículo se puede estimar como la detección más grande del track, que se corresponde con el cuadro en el cual el plano de ultrasonido corta al folículo (aproximadamente una esfera) en su círculo máximo.
Experimentos y Resultados
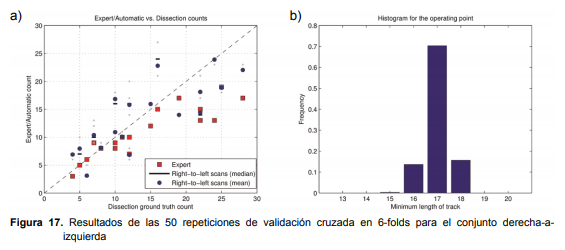
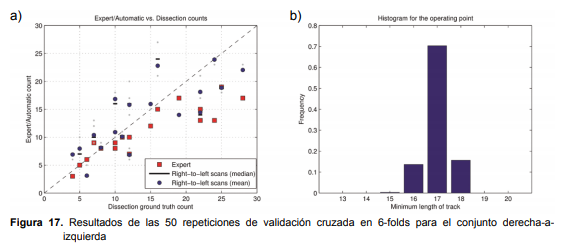
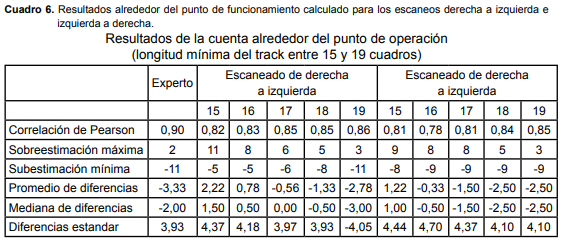
Los fantomas fueron utilizados para evaluar este enfoque. Como se mencionó en la sección “conjunto de datos”, para cada ovario se realizaron dos escaneos con ultrasonido (derecha a izquierda e izquierda a derecha), donde cada ovario es escaneado mediante un movimiento de rotación que lo cubre de extremo a extremo. Para determinar el punto de funcionamiento (el umbral para el mínimo número de cuadros para considerar una detección de folículo), se realizaron 50 repeticiones de validación cruzada en 6–folds, sobre el conjunto de adquisiciones derecha a izquierda. El cuadro 6 presenta los resultados de la validación cruzada.
Se observa que el punto de funcionamiento se concentra alrededor de un largo mínimo de track de 17 cuadros (Figura 17b). Como los videos son de 30 cuadros por segundo, esto quiere decir que los tracks tienen que estar activos por más de medio segundo para ser considerados como folículo. Alrededor de este punto de funcionamiento, los resultados contrastados contra la disección pueden ser considerados comparables al experto, con un menor factor de correlación pero algo mejor centrados (Figura 17a y cuadro 6). Es conocido por los expertos que la exactitud de la cuenta cae cuando el número de folículos en el ovario aumenta (se tiende a subestimar la cuenta). Los resultados en este conjunto de datos son consistentes con este hecho. La cuenta brindada por el experto es muy cercana a la obtenida mediante disección en ovarios con pocos folículos (menos de 18 en este conjunto de datos) mientras que se aleja al aumentar la cantidad de folículos. El método automático también subestima la cuenta en ovarios con muchos folículos pero el resultado se aproxima más a la disección en estos casos.
Conclusiones
Se presentó un algoritmo para resolver el problema de detectar folículos antrales presentes en ovarios de vacas, utilizando videos de ultrasonido. El método de conteo de folículos explorado trabaja directamente sobre los videos de ultrasonido generados en el escaneo de ovarios, con la única restricción que el escaneo debe realizarse en una única pasada que cubra el ovario de extremo a extremo. El bajo requerimiento computacional del procesamiento posibilita la obtención de los resultados inmediatamente después del escaneo. El método permite además estimar el tamaño de los folículos detectados.
A pesar que el número de fantomas con los que se realizaron los experimentos no es muy grande, los resultados se pueden considerar promisorios, con conteos comparables a un experto pero en un ambiente muy controlado.
El pasaje a una evaluación en campo requerirá con seguridad de un robustecimiento de los distintos pasos del procedimiento. El trabajo debería incluir por ejemplo, la evaluación de otras estrategias para identificar los folículos verdaderos de las detecciones, así como formas alternativas de identificar la región del ovario en el video in vivo. Además, un método para detectar el cuerpo lúteo en el ovario puede ayudar a diferenciar las cavidades de cuerpo lúteo de folículos reales.




{kind=link}